|
Движение центробежного вибратора в классическом варианте. Задача решается на уровне почти школьной физики и математики.
Составляем векторные уравнения для корпуса и грузов: Проецируем на оси \(\displaystyle \mathbf{x}\) и \(\displaystyle \mathbf{y}\), ось \(\displaystyle \mathbf{x}\) направлена вдоль направления движения: Суммируем (1) и (2). Интегрируем (4) по времени. Кинематические соотношения по оси \(\displaystyle \mathbf{x}\), обусловленные устройством центробежного вибратора: Кинематические соотношения по оси \(\displaystyle \mathbf{y}\): Подставляем \(\displaystyle v_{1x}\) в уравнение закона сохранения количества движения и находим скорость грузов по оси \(\displaystyle \mathbf{x}\): \(\displaystyle m_1 \cdot v_{2x}+ m_1 \cdot ω_z R \cdot sin(α)+ m_2 \cdot v_{2x}= 0\); \(\displaystyle m_1 \cdot ω_z R \cdot sin(α)+ (m_1 + m_2) v_{2x} = 0\); \(~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~\) \(\displaystyle v_{2x}= -\left(\frac{m_1}{m} \right) ω_z R \cdot sin(α)\); \(\displaystyle v_{1x} = v_{2x}+ ω_z R \cdot sin(α)\); \(\displaystyle v_{1x} = ω_z R \cdot sin(α)- \left(\frac{m_1}{m} \right) ω_z R \cdot sin(α)\); \(~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~\) \(\displaystyle v_{1x}= \left(\frac{m_2}{m} \right) ω_z R \cdot sin(α)\);
Используем закон сохранения энергии Подставляем скорости и подробно расписываем решение: \(\displaystyle m_{1} \left(\frac{m_{2}}{m} ω_{z} R \cdot sin(α) \right)^2 + m_{2} \left(\frac{m_{1}}{m} ω_{z} R \cdot sin(α) \right)^2 + m_{2} \left(ω_{z} R \cdot cos(α) \right)^2 = 2E_{0}\); \(\displaystyle m_{1} \frac{m_{2}^2}{m^2} \left(ω_{z} R \cdot sin(α) \right)^2 + m_{2} \frac{m_{1}^2}{m^2} \left(ω_{z} R \cdot sin(α) \right)^2 + m_{2} \left(ω_{z} R \cdot cos(α) \right)^2 = 2E_{0}\); \(\displaystyle \left(ω_{z} R \cdot sin(α) \right)^2 \left( m_{1} \frac{m_{2}^2}{m^2}+ m_{2} \frac{m_{1}^2}{m^2} \right) + m_{2} \left(ω_{z} R \cdot cos(α) \right)^2 = 2E_{0}\); \(\displaystyle \frac{m_2 \cdot m_1}{m} \left(ω_{z} R \cdot sin(α) \right)^2 + m_{2} \left(ω_{z} R \cdot cos(α) \right)^2 = 2E_{0}\); \(\displaystyle m_2 (ω_{z} R)^2 \left(\frac{m_1}{m} sin(α)^2 + cos(α)^2 \right) = 2E_{0}\); \(\displaystyle m_2 (ω_{z} R)^2 \left(\frac{m_1}{m} sin(α)^2 + 1 - sin(α)^2 \right) = 2E_{0}\); \(\displaystyle m_2 (ω_{z} R)^2 \left(1 - \frac{m_2}{m} sin(α)^2\right) = 2E_{0} = m_2 \cdot v_{2y0}^2\); \(\displaystyle (ω_{z} R)^2 \left(1- \frac{m_2}{m} sin(α)^2\right) = v_{2y0}^2\); \(\displaystyle ω_{z}^2 \left(1- \frac{m_2}{m} sin(α)^2\right)= \frac{v_{2y0}^2}{R^2}= ω_{z0}^2\), где \(\displaystyle ω_{z0}-\) угловая скорость грузов при \(\displaystyle α = 0\), когда корпус покоится, т. е. при максимальной энергии грузов. \(~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~\) \(\displaystyle ω_z= \frac{ω_{z0}}{\sqrt{1- \frac{m_2}{m} sin(α)^2 }}= \frac{d α}{dt}\). Найдем время Интегрируем это выражение Если ввести обозначение \(\displaystyle k= \sqrt{\frac{m_2}{m}} \); \(\displaystyle ~~T_0= \frac{2 \pi}{ω_{z0}}\), тогда \(\displaystyle t= \frac{T_0}{2 \pi} \int\limits_{0}^{α} \sqrt{1- k^2 sin(α)^2 }~ dα\). Время выражается через эллиптический интеграл второго рода, который аналитически не берётся и вычисляется по таблицам. Для вибратора с параметрами пружинного инерцоида \(\displaystyle k= \sqrt{\frac{m_2}{m}}= \sqrt{\frac{0,26}{0,95}}= 0,52315 \); \(\displaystyle arcsin(0,52315)= 31,54°\). На интервале интегрирования \(\displaystyle 0° - 90°\) по таблицам полных интегралов имеем: Линейно интерполируем \(\displaystyle \frac{1,4539- 1,4608}{32° - 31°} = -0,0069.\) \(\displaystyle 1,4608- 0,0069 \cdot (31,54° - 31°) = 1,4608 - 0,0069 \cdot 0,54° = 1,457\). Это значение интеграла за четверть периода. \(\displaystyle T= \frac{5,8282}{2 \pi}= 0,9276\) сек при \(\displaystyle T_0 = 1\) cек.
Проинтегрируем уравнение закона сохранения импульса (5) Добавляем кинематическое уравнение связи между перемещением грузов и корпуса \(\displaystyle s_{2x}= R \cdot cos(α)+ s_{1x}\). \(\displaystyle m_1 \cdot s_{1x}+ m_2 (R \cdot cos(α)+ s_{1x})=0\). \(\displaystyle m_1 \cdot s_{1x}+ m_2 \cdot R \cdot cos(α) + m_2 \cdot s_{1x}=0\). \(\displaystyle m \cdot s_{1x}+ m_2 \cdot R \cdot cos(α)=0\). \(~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~\) \(\displaystyle s_{1x}=- \frac{m_2}{m} R \cdot cos(α)\). Найдем перемещение при повороте грузов в интервале \(\displaystyle 0° - 180°\). В случае вибратора с параметрами пружинного инерцоида Толчина Рассмотрим первый мысленный эксперимент. За время отката назад корпус вибратора проедет расстояние За время хода вперёд корпус вибратора проедет расстояние В сумме \(60\) мм. Рассмотрим второй мысленный эксперимент. За время отката назад корпус вибратора проедет расстояние За время хода вперёд корпус вибратора проедет расстояние В сумме \(60~мм\). Для промежуточных вариантов соотношения времени хода вперёд и отката назад можно записать: Обратите внимание, что при нулевой скорости центра масс: В сумме \(0~мм\). А теперь, задумайтесь над тем, как должно влиять трение на движение вибратора, чтобы обеспечить движение корпуса в соответствии с экспериментом при средней скорости \(60~мм/с\): В сумме \(+60~мм\). Значение отката назад равное \(-30~мм\) можно получить только в том случае, если центр масс за время отката, в среднем практически покоится, его среднее перемещение вперёд не должно превышать \(2,842~мм\). Тогда возникает вопрос, как после такого отката, при ходе вперед получается \(90~мм\), когда должно быть около \(32,84~мм\), так как в начале хода вперёд скорость центра масс практически нулевая. Если трение при откате назад увеличивать, то величина отката будет только уменьшаться. Получить откат в \(-30~мм\) можно только при трении, которое практически не влияет на колебательный процесс вибратора. А ведь именно трение при движении назад в академическом варианте объяснения движения инерцоида является базовым, при этом предполагается, что трение вперёд получается меньше из-за большей скорости движения корпуса (Соснин). В классическом варианте импульс силы при ходе корпуса вперёд меньше не только по причине меньшего времени взаимодействия, но и по причине снижения трения. При использовании подшипников качения трение практически не зависит от скорости (жидкая смазка) в реальном диапазоне скоростей инерцоида, о чём лукаво молчат, акцентируя всё внимание на график трения сухих поверхностей, тем самым совершенно игнорируя эксперименты Толчина. Программа виброхода, Страница_4. Найдём скорость корпуса через угол поворота: \(\displaystyle ω_z = \frac{ω_{z0}}{\sqrt{1- γ \cdot sin(α)^2}}\); \(\displaystyle v_{1x}= \frac{γ \cdot ω_{z0} R \cdot sin(α)}{\sqrt{1 - γ \cdot sin(α)^2 }}\). Максимальная скорость корпуса будет при \(α = 90°\). Например, при \(γ=0,2737\); \(\displaystyle \frac{γ}{\sqrt{1-γ}} = 0,3768\); \(ν = 1~Гц\), будет \(v_{max~1x}=14,2~см/с\). Найдём ускорение корпуса дифференцируя \(\displaystyle v_{1x} = γ \cdot ω_z R \cdot sin(α)\); Найдём угловое ускорение из \(\displaystyle ω_z = \frac{ω_{z0}}{\sqrt{1- γ \cdot sin(α)^2}}\). \(\displaystyle \frac{dω_z}{dt} = (-1/2) \cdot ω_{z0} (1- γ \cdot sin(α)^2)^{-3/2} (-2γ \cdot sin(α) \cdot cos(α) \cdot ω_z)=\) \(\displaystyle = ω_{z0} (1- γ \cdot sin(α)^2)^{-3/2} \cdot γ \cdot sin(α) \cdot cos(α) \cdot ω_z =\) \(\displaystyle = ω_{z0} (1-γ \cdot sin(α)^2)^{-3/2} \cdot γ \cdot sin(α) \cdot cos(α) \cdot ω_{z0}(1- γ \cdot sin(α)^2)^{-1/2}.\) \(\displaystyle \frac{dω_z}{dt}=\frac{γ \cdot ω_{z0}^2 \cdot sin(α) \cdot cos(α)}{(1-γ \cdot sin(α)^2)^{2}}.\)
\(\displaystyle a_{x1}=\frac{γ \cdot ω_{z0}^2 R \cdot cos(α)}{1-γ \cdot sin(α)^2}+ \frac{γ^2 \cdot ω_{z0}^2 R \cdot sin(α)^2 \cdot cos(α)}{(1-γ \cdot sin(α)^2)^2}\); \(\displaystyle a_{x1}=\frac{γ \cdot ω_{z0}^2 R \cdot cos(α)}{1-γ \cdot sin(α)^2} \left(1+\frac{γ \cdot sin(α)^2}{1-γ \cdot sin(α)^2}\right)\); \(\displaystyle a_{x1}=\frac{γ \cdot ω_{z0}^2 R \cdot cos(α)}{(1-γ \cdot sin(α)^2)^2}\); \(~~~~~~~~\) \(\displaystyle a_{x1}=\frac{γ \cdot ω_{z}^2 R \cdot cos(α)}{1-γ \cdot sin(α)^2}\). Найдем силу, действующую на корпус при: \(α=0°\); \(α=45°\); \(α=60°\); \(α=80°\), и частоте вращения в медленном полутакте \(ν_0=0,5~Гц\) \((T_0=2~сек)\), т. е. при \(T=1~сек\); \(T_2 = 0,93~сек\); \(T_1=0,07~сек\). \(F_{1~α=0°}=11,40~грамм\). \(F_{1~α=45°}=10,82~грамм\). \(F_{1~α=60°}=9,03~грамм\). \(F_{1~α=80°}=3,67~грамм\). Эти значения силы практически минимальны при \(T = 1~сек\), так как время \(T_1\) составляет всего 7% от периода \(T\). В реальном опыте сила, действующая на корпус несколько больше.
В своих опытах Толчин изучал работу инерцоида и при частоте порядка \(ν=4~Гц\). Скорость движения в этом случае возрастала в 4 раза и центростремительные силы в 16 раз. Относительная роль сил трения уменьшается соответственно тоже в 16 раз, но это не привело к изменению характера движения механизма. Заметим, что, если учитывать предположения Соснина, то влияние трения должно уменьшиться более чем в 16 раз, так как инерцоид в этом случае работает в зоне спада величины трения в зависимости от скорости. Введем в уравнение ускорения корпуса составляющую, связанную с наличием трения.
Формально можно записать так \(\displaystyle a_{1x}= γ \cdot ω_z^2 R \cdot cos(α)+ γ \frac{dω_z}{dt} R \cdot sin(α)+ \frac{F_{тр}}{m}\). (9)
Найдем перемещение корпуса при \(F_{тр}=0\), через двойной интеграл от проекции центробежного ускорения: \(\displaystyle s_{1x}=γ R \int \int cos(α)~ω_z dt~ω_z dt=γ R \int \int cos(α)~dα~dα= γ R \int sin(α)~dα= -γ R \cdot cos(α)\). Обратите внимание, что этот интеграл не зависит от угловой скорости. Независимость от угловой скорости фактически означает независимость амплитуды перемещения от внутренних моментов, действующих на рычаги. В различных источниках можно встретить формулу \(\displaystyle a_{1x}= \frac{m_2}{m} ω_z^2 R \cdot cos(α)\) или
Рассмотрим эту задачу в более общем виде с учётом трения со стороны опоры и силовых моментов, действующих на грузы. \(m_1 \cdot \vec a_1=~~~ \vec F+ \vec F_{тр}- [\vec M / \vec R]\); Проецируем на координатные оси и решаем задачу только в плоскости: \(F_{1x}= ~~~F \cdot cos(α)\); \(\displaystyle m_1 \cdot a_{1x}= ~~~F \cdot cos(α)+ F_{тр}+ \frac{M_z \cdot sin(α)}{R}\); Эту систему уравнений будем использовать в численной модели виброхода. Найдём ускорение центра масс по оси x. Ускорение центра масс зависит только от трения об опору. Момент сил влияет на движение центра масс только косвенно через скорость движения корпуса. ...
Угловая скорость вращения двух тел связанных жестким стержнем равна: Докажем эту формулу. \(\displaystyle v_{2x}-v_{1x}=-ω_z R \cdot sin(α)+ \frac{dR}{dt} cos(α)\); \(~~~~~~~\) \(\displaystyle v_{2y}-v_{1y}=ω_z R \cdot cos(α)+ \frac{dR}{dt} sin(α)\); \(\displaystyle ω_z = ω_z R \cdot \frac{sin(α) \cdot sin(α)}{R}+ ω_z R \cdot \frac{cos(α) \cdot cos(α)}{R}\). Покажем, что справедлива также формула для модуля угловой скорости \(\displaystyle ω_z= \frac{\sqrt{(ω_z R \cdot sin(α))^2+(ω_z R \cdot cos(α))^2}}{R}\), только при условии \(\displaystyle \frac{dR}{dt}=0\). Покажем, что угловое ускорение при вращении двух тел связанных жестким стержнем равно: \(\displaystyle \frac{dω_z}{dt}= \frac{(a_{1x}-a_{2x})sin(α)+(a_{2y}-a_{1y})cos(α)}{R}\). Так как \(\displaystyle a_{2x}-a_{1x}=-ω_z^2 R \cdot cos(α)- \frac{dω_z}{dt} R \cdot sin(α)\); \(~~~~~~~\) \(\displaystyle a_{2y}-a_{1y}= -ω_z^2 R \cdot sin(α)+ \frac{dω_z}{dt} R \cdot cos(α)\); \(\displaystyle \frac{dω_z}{dt}= \frac{(ω_z^2 R \cdot cos(α)+ \frac{dω_z}{dt} R \cdot sin(α)) \cdot sin(α)}{R}+ \frac{(-ω_z^2 R \cdot sin(α)+ \frac{dω_z}{dt} R \cdot cos(α)) cos(α)}{R}=\) \(\displaystyle = \frac{\frac{dω_z}{dt} R \cdot sin(α) \cdot sin(α)}{R}+ \frac{\frac{dω_z}{dt} R \cdot cos(α) \cdot cos(α)}{R}\). Для центробежного вибратора эти формулы можно записать без координаты \(s_{1y}\) \(\displaystyle ω_z= \frac{\sqrt{(v_{1x}-v_{2x})^2+ v_{2y}^2}}{R}\); \(\displaystyle \frac{dω_{z}}{dt}=\frac{(a_{1x}-a_{2x}) \cdot sin(α)}{R}+ \frac{a_{2y} \cdot cos(α)}{R}\). (6) Обратите внимание, что для вычисления этих функций надо знать кинематические параметры грузов и корпуса одновременно. Однако, существует ещё одно дополнительное условие на угловое ускорение. Например, в статье Е. Л. Тарунина под названием, «Влияние трения на движение инерцоида» за 1996 г., в процессе вычисления у Евгения Леонидовича получается следующее уравнение для углового ускорения рычага вибратора, полученное из уравнения Лагранжа. \(\displaystyle \frac{dω_{z}}{dt}= \frac{a_{1x} \cdot sin(α)}{R}\). (7) Перепишем (6) в следующем варианте Сравнивая (7) и (8) получим \(a_{2y} cos(α)- a_{2x} sin(α)=0\). Проверка численным способом, показывает, что это условие справедливо, \(a_{2y}=a_{2x} tg(α)\). Рассмотрим решения, которые удовлетворяют этому дифференциальному уравнению – условию, например \(a_{2yr}= -ω_{z} V_τ \cdot sin(α)\); \(~~~~~~~\) \(a_{2xr}= -ω_{z} V_τ \cdot cos(α)\); \(a_{2yr}= ω_{z} V_{τx}\); \(~~~~~~~\) \(a_{2xr}= -ω_{z} V_{τy}\); \(\vec a_{2r}= [\vec ω_{z}× \vec V_τ]\); В этом случае ускорение грузов имеет гироскопический характер относительно окружной скорости. Из (7) следует В более общем векторном виде это можно записать так Для любого ускорения \(\vec a_2 \) направленного вдоль стержня, выражение \(\displaystyle \frac{a_{2y} \cdot cos(α)-a_{2x} \cdot sin(α)}{R}= \frac{a_2 \cdot sin(α) \cdot cos(α)-a_2 \cdot cos(α) \cdot sin(α)}{R}=0\). Если в уравнение (8) подставить ускорение грузов под действием момента сил, то получим \(\displaystyle = \frac{a_{1x} \cdot sin(α)}{R}+ \frac{\left(\frac{M_z \cdot cos(α)}{R \cdot m_2} cos(α)+ \frac{M_z \cdot sin(α)}{R \cdot m_2} sin(α) \right)}{R}=\) \(\displaystyle = \frac{a_{1x} \cdot sin(α)}{R} + \frac{M_{z}}{m_{2} R^2}\). $ \displaystyle \frac{dω_{z}}{dt}= \frac{a_{1x} \cdot sin(α)}{R}+ \frac{M_{z}}{I_2} $. Используем уравнение (9) \(\displaystyle a_{1x}=γ \cdot ω_{z}^2 \cdot R \cdot cos(α)+ γ \cdot \frac{dω_{z}}{dt}\cdot R \cdot sin(α)+ \frac{F_{тр}}{m}\); $ \displaystyle a_{1x}=γ \cdot ω_{z}^2 \cdot R \cdot cos(α)+ γ \cdot \left(\frac{a_{1x} \cdot sin(α)}{R}+ \frac{M_{z}}{I_2} \right) \cdot R \cdot sin(α) + \frac{F_{тр}}{m} $; $ \displaystyle a_{1x}=γ \cdot ω_{z}^2 \cdot R \cdot cos(α)+ γ \cdot a_{1x} \cdot sin(α)^2 + γ \cdot \frac{M_{z} \cdot R \cdot sin(α)}{I_2} + \frac{F_{тр}}{m} $; $ \displaystyle a_{1x}-γ \cdot a_{1x} \cdot sin(α)^2= γ \cdot ω_{z}^2 \cdot R \cdot cos(α)+ \frac{M_{z} \cdot sin(α)}{m_2 R}+ \frac{F_{тр}}{m} $; $ \displaystyle a_{1x}= \frac{γ \cdot ω_{z}^2 \cdot R \cdot cos(α)+ \frac{M_{z} \cdot sin(α)}{m_2 R}+ \frac{F_{тр}}{m} }{1- γ \cdot sin(α)^2}. $
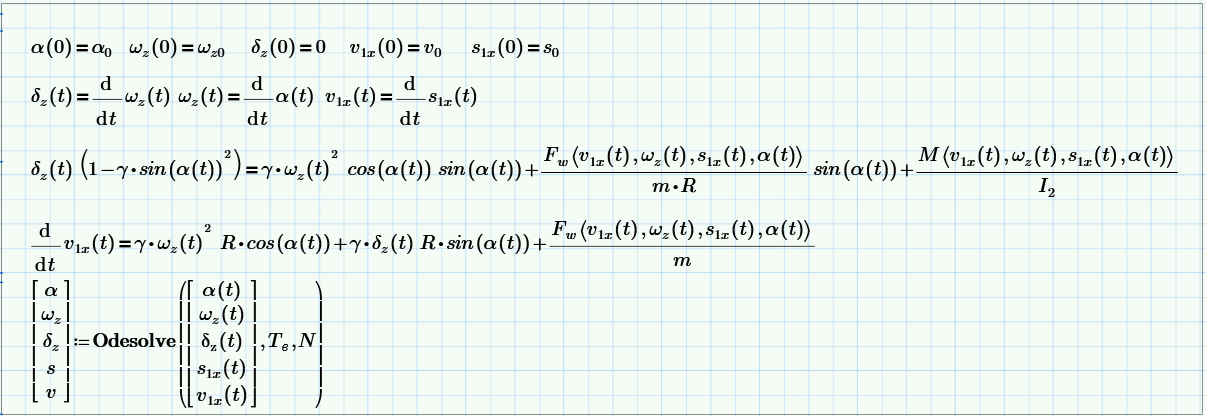
Дифференциальные уравнения движения вибратора через уравнения Лагранжа. $ \displaystyle L= \frac{ m_{1} \cdot v_{1x}^2}{2}+ \frac{ m_{2} \cdot (v_{2x}^2 + v_{2y}^2)}{2}. $ Так как $ \displaystyle v_{2x} = v_{1x} - ω_{z} \cdot R\cdot sin(α) $ и $ \displaystyle v_{2y} = ω_{z} \cdot R\cdot cos(α) $, то $ \displaystyle L = \frac{m_{1} \cdot v_{1x}^2}{2} + \frac{m_{2} \cdot ((v_{1x}- ω _{z} \cdot R \cdot sin(α))^2+ (ω _{z} \cdot R \cdot cos(α))^2)}{2} = $ $ \displaystyle = \frac{m_{1} \cdot v_{1x}^2}{2} + \frac{m_{2} \cdot (v_{1x}^2 + ω _{z}^2 \cdot R^2 \cdot sin(α)^2 - 2 \cdot v_{1x} \cdot ω _{z} \cdot R \cdot sin(α)+ ω _{z}^2 \cdot R^2 \cdot cos(α)^2)}{2}; $ $ \displaystyle L = \frac{m \cdot v_{1x}^2}{2} + \frac{m_{2} \cdot (ω _{z}^2 \cdot R^2 - 2 \cdot v_{1x} \cdot ω _{z} \cdot R \cdot sin(α))}{2}; $ Запишем уравнение Лагранжа для координат корпуса Находим производные $ \displaystyle \frac {d} {dt} \left(\frac{\partial L}{\partial v_{1x}} \right) = m \cdot a_{1x} - m_{2} \cdot \frac{dω _{z}} {dt} \cdot R \cdot sin(α) - m_{2} \cdot ω _{z}^2 \cdot R \cdot cos(α); $ $ \displaystyle \frac{\partial L}{\partial x_{1}} = 0 $, тогда $ \displaystyle m \cdot a_{1x}- m_{2} \cdot \frac{dω_{z}} {dt} \cdot R \cdot sin(α) - m_{2} \cdot ω _{z}^2 \cdot R \cdot cos(α) = F_{тр}; $ \(\displaystyle m \cdot a_{1x}= m_{2} \cdot ω_{z}^2 \cdot R \cdot cos(α) + m_{2} \cdot \frac{dω _{z}} {dt} \cdot R \cdot sin(α) + F_{тр};\) \(\displaystyle a_{1x}=\gamma \cdot \omega_{z}^2 \cdot R\cdot cos(α) + γ \cdot \frac{dω_{z}} {dt} \cdot R \cdot sin(α)+\frac{F_{тр}} {m}.\) (10) Это уравнение интегрируется на интервале времени при \(F_{тр} = const\) \(\displaystyle s_{1x} = -\gamma \cdot R \cdot cos(α) + \frac{1}{2}\frac{F_{тр}}{m}\cdot t^2 + v_{1x0}\cdot t + s_{1x0}.\) Запишем уравнение Лагранжа для угла поворота грузов Находим производные \( \displaystyle \frac{d}{dt}\left(\frac{\partial L}{\partial\omega_z}\right) = m_2\cdot\frac{d\omega_z}{dt}\cdot R^2 - m_2\cdot a_{1x}\cdot R\cdot sin(\alpha)- m_2\cdot v_{1x}\cdot \omega_z\cdot R\cdot cos(\alpha);\) \(\displaystyle \frac{\partial L}{\partial\alpha}= - m_2\cdot v_{1x}\cdot \omega_z\cdot R\cdot cos(\alpha);\) \(\displaystyle m_2\cdot\frac{d\omega_z}{dt}\cdot R^2 - m_2\cdot a_{1x}\cdot R\cdot sin(\alpha) = M_z;\) \(\displaystyle \frac{d\omega_z}{dt}- a_{1x}\cdot\frac{sin(\alpha)}{R} = \frac{M_z}{I_2};\) \(\displaystyle \frac{d\omega_z}{dt} = a_{1x}\cdot\frac{sin(\alpha)}{R} + \frac{M_z}{I_2}.\) (11) Объединим дифференциальные уравнения (10) и (11). \(\displaystyle \frac{d\omega_z}{dt} (1-\gamma \cdot sin(\alpha)^2 )=\gamma \cdot \omega_z^2 \cdot cos(\alpha) sin(\alpha) + \frac{F_{тр}}{m R} \cdot sin(\alpha) + \frac{M_z}{I_2}\). (12) Решим систему из уравнений (10) и (12) в среде Mathcad'a при разных параметрах, определяющих движение вибратора. Составим блок решения.
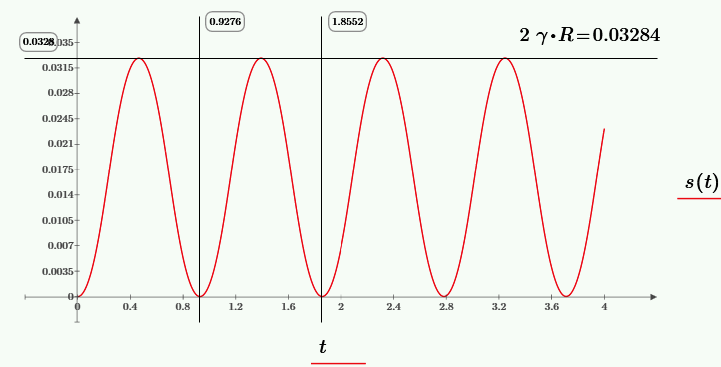
Перечислим общие параметры и функции, необходимые для вычислений. \(g=9,80665~м/c^2-\) стандартное ускорение. \(I_2=m_2 \cdot R^2=9,36 \cdot 10^{-4}~кг \cdot м^2-\) суммарный момент инерции грузов. \(\displaystyle \gamma=\frac{m_2}{m}=0,2737-\) параметр центробежного вибратора. \(ω_{z0}=2 \pi ν,~с^{-1}-\) начальная угловая скорость грузов. \(q=g/1000-\) перевод грамм в Ньютоны для функции трения. \(к=-4000-\) коэффициент для функции трения. Формирует фронт прямоугольного импульса. \(F_w(v,\omega,s,\alpha)=q \cdot F_t \cdot tanh(к \cdot v)-\) функция трения. \(m_1=0,69~кг-\) масса корпуса. \(m_2=0,26~кг-\) суммарная масса грузов. \(m=m_1+m_2=0,95~кг-\) полная масса вибратора. \(R=0,06~м-\) радиус движения грузов. \(N=T_в \cdot 5000=20000-\) количество расчётных точек. \(\alpha_0=0-\) начальное угловое положение грузов. \(v_0=0~м/с-\) начальная скорость корпуса. \(s_0=0~м-\) исходная координата корпуса. Параметры для текущей серии графиков. \(T_в=4~сек-\) период расчёта движения. \(ν=1~Гц-\) мгновенная частота вращения грузов при \(\alpha=0\). \(F_t=0~грамм-\) модуль трения колёс. \(M=0-\) момент действующий на грузы. График колебаний корпуса вибратора.
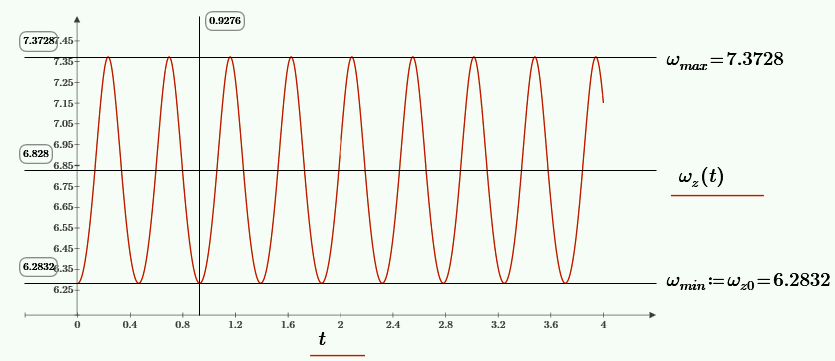
График угловой скорости грузов.
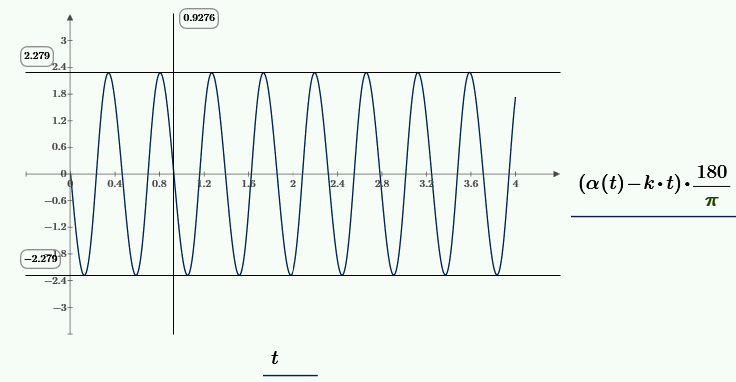
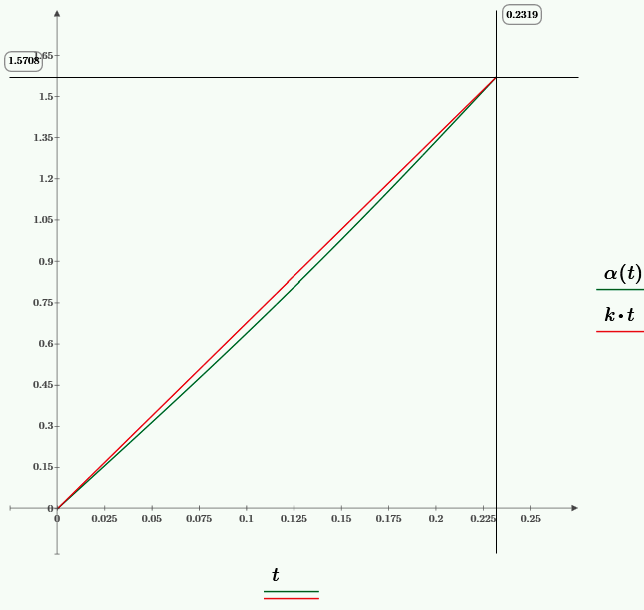
Колебания угловой скорости появляются в результате обмена энергией между грузами и корпусом вибратора. Колебания угла перемещения грузов в сравнении с равномерным вращением.
Размах колебаний угла равен \(4,56°\).
...
|
||
Механика инерцоида
| ||
| Главная | Движение вибратора | Мой профиль | Выход | Вы вошли как Гость | Группа " Гости" | RSS |  |